Performance evaluation of Wave observation system using GPS
Despite the Wave observations data is very important information to human life at sea, the technology development and research for wave equipments are lacking. In this study, the wave observation system using GPS was evaluated the quality of wave observation data by comparing of long-term observations. The result of the comparison of the acceleration sensor (Hippy-40) and GPS sensor (Mose-1000), the correlation coefficient of the significant wave height and significant wave periods is 0.997 and 0.990 respectively. Also in case of BIAS, the significant wave height is 0.014 m, the significant wave period is -0.212 sec. It makes no significant differences whether the acceleration sensor (Hippy-40) and GPS sensor (Mose-1000). These results of the wave observation data using GPS quality will be evaluated as very good.
초록
파랑 관측 자료는 인간이 바다에서 활동을 하는데 있어 아주 중요한 정보임에도 불구하고, 국내에서는 파랑 관측 장비에 대한 기술 개발이나 연구가 부족한 형편이다. 본 연구는 Single GPS를 이용한 파고 관측 자료의 정확한 품질을 평가하기 위해 장기간 비교 관측을 실시하였다. 가속도센서(Hippy-40)와 GPS센서(Mose-1000)의 비교 관측 결과, 유의파고의 상관계수는 0.997이며, 유의파 주기의 상관계수도 0.990으로 거의 일치하고 있다. 또한 BIAS에서도 유의파고는 0.014 m, 유의파주기는 -0.212초로 거의 차이가 없는 것으로 평가되었다. 이러한 결과는 GPS를 이용한 파고 관측 자료의 품질이 아주 우수한 것으로 평가되는 것이다.
Keywords:
GPS sensor, acceleration sensor, significant wave height, significant wave period, GPS센서, 가속도센서, 유의 파고, 유의파주기1. 서 론
파랑은 인간이 바다에서 다양한 활동을 하는데 있어서 중요한 정보이다. 선박운항, 어로, 수산업, 해양 레저 등을 위해서는 파랑 관측 정보가 필수적으로 요구된다. 기상청을 비롯하여 한국해양과학 기술원, 국립해양조사원에서는 우리나라 주변 해역에서 실시간 파랑 관측을 시행하고 있다. 기상청[www.kma.go.kr]은 9대의 해양기 상관측부이와 9소의 등표 또는 등대 주변에 파고 관측 기기를 설치하여 운영하고 있다. 한국해양과학기술원[www.kiost.ac]은 황해 중부해역에 10 m급 부이를 설치하여 운영하고 있으며, 해양조사원에서는 "이어도 해양과학기지", "가거초 해양과학기지"를 비롯하여 연안에서도 파고를 관측하여 실시간 제공하고 있다[www.khoa.go.kr].
파고를 관측하는 방법에는 가속도계를 이용하는 방법, 수압을 이용하는 방법, 초음파를 이용하는 방법, Microwave 주파수를 이용하는 방법 등 여러 종류의 기기가 사용되고 있다. 가속도계를 이용한 부이식 파고계는 수심이나 주변의 지형적 영향을 받지 않게 설치·운영할 수가 있으며, 수압을 이용하는 압력식파고계와 수중에 설치하는 초음파식 파고계는 설치 수심의 제약을 받고, Microwave 주파수를 이용하는 레이더식 파고계는 플랫폼의 설치 고도 등에 영향을 받는다(KMA [2009]).

The schemetic diagram of RTK-GPS (a) and PVD-GPS (b)
최근에는 GPS(Global Positioning System, 위성항법장치) 측정 자료의 정밀도가 높은 제품이 개발되면서 이를 이용한 파고 관측 시스템도 개발되고 있다. 부이에서 GPS를 이용한 관측은 RTK(Real Time Kinematic) 방법과 PVD(Point precise Variance Detection) 방법 등 2가지 방법이 있다. RTK 방법은 육상의 고정된 기준점(reference point)에 대한 절대값을 산출하므로 기준점에서 수 이내의 연안해역의 관측에 사용되므로 외해에서의 파고 관측 보다는 연안해역에서 쓰나미나 조석 관측에 보다 더 적합하다(Fig. 1(a)).
PVD 방법은 관측 지점에서의 GPS 정보만을 사용하는 방법이므로 고정된 기준점이 필요하지 않다(Fig. 1(b)). 따라서 PVD 방법은 위치정보의 절대값을 산출하지 않으므로 상대적인 관측 값을 이용한 파랑 관측에는 이용할 수가 있다(Takashi et al[2004]). Kawai et al[2011, 2012]는 연안지역에 RTK-GPS를 설치하여 sunami 등 다양한 자료 분석·연구를 하고 있다. 또한 RTK-GPS에서 관측한 자료와 해저에 설치하는 파고계 자료를 비교한 결과, GPS에서 관측된 자료가 해저 파고계 결과보다 높게 관측된 것으로 보고되고 있다(Nakai et al[2008]). 우리나라에서 GPS를 이용한 파고 관측 연구는 Kim et al[2011]이 GPS를 이용한 장주기 파고 관측 시스템 개발에 관한 연구가 있으며, Yoo et al[2003]은 일본 연안역에서 GPS를 소형선박에 설치하여 GPS 정보를 분석하는 방법으로 파향 분석에 대한 연구가 있는 정도이다.
연안 해역에서의 비교 관측은 수심, 주변 환경 조건, 지역적인 바람의 변화 등에 따라 차이가 발생할 수가 있으므로 정확한 비교 관측은 동일한 관측지점에서 관측을 실시하여야 할 것이다. 본 연구는 RTK-GPS와 달리 단일 GPS만을 이용하는 방법으로 파고를 측정할 수 있는 관측 시스템을 개발하여 세계적으로 관측 자료의 품질이 우수한 것으로 인정받고 있는 네덜란드 Datawell사의 가속도센서 파고계(Model: Hippy-40)와 장기간의 비교 관측을 통하여 성능을 평가하고자 한다. 이러한 파고관측 비교 평가는 주변 연안의 환경 영향을 받지않는 외해(open sea)에서 동일한 부이에 설치하여 장기간 현장 비교 관측으로 이루어 졌다.
2. 현장 비교 관측
2.1 관측 개요
GPS 파고계는 위성을 이용하여 불규칙한 해수면의 변화를 측정하는 새로운 관측 장비이므로 관측 자료를 바탕으로 성능에 대한 검증이 필요하다. GPS를 이용한 파고 관측 자료의 성능 평가를 위하여 Datawell사에서 개발된 "Hippy-40" 이라는 가속도센서로부터 얻어진 자료와의 비교로 그 성능을 평가하고자 하였다. 비교 관측은 2011. 8. 20~2012. 2. 10까지 30분 간격으로 자료를 산출하였으며, 보다 정확한 성능 평가를 위하여 동일한 부이에 GPS 센서와 가속도 센서를 설치하여 관측하였다. 설치 위치는 126°12'08E,30°19'50N이고, 수심은 81 m이다(Fig. 2).

The Observation Station (a) and the Ocean Data Buoy (b)
2.2 가속도식 파고계(Model: Hippy-40)
바다에 떠 있는 부유 물체는 6축 운동을 하게 된다(Fig. 3). 3차원적인 수평(sway, surge) 및 수직(heave) 방향으로 이동하는 움직임과 각 축을 중심으로 하는 회전운동(yaw, roll, pitch)을 하게 된다. 부유물체가 수직적으로 이동하는 heave 성분 값이 불규칙한 해수면의 승강을 의미하는 파고 값을 나타낸다고 할 수가 있다.

The motion of rigid body has six degrees of freedom (Holthuijsen,2007)
"Hippy-40" 가속도센서는 불규칙한 해상 상태에 따라 움직이는 부이의 연직 가속도를 측정하여 전기적으로 2회 적분하여 해수면의 변위인 Heave 값을 산출하고, 이를 분석하여 파고 성분을 계산하는 가속도계이다. 파고 측정범위는 ±10 m이고 해상도는 1 cm이다. 측정 간격은 0.5초 또는 1초로 설정할 수 있으며, 파 주기의 측정 범위는 최대 40초이다. 이 가속도센서는 자료 정확도가 우수하여 전 세계 대부분 파고 관측에 활용되고 있으며, 관측 수심, 주변의 지형적 환경은 물론 악기상에 의한 환경의 영향을 받지 않는다(KMA[2009]).
2.3 GPS 관측 센서(MOSE-1000)
본 연구는 외해에서 GPS(Global Positioning System, 위성항법장치)를 이용한 파고 관측을 실시하므로 연안에 기준점을 설치할 수 없어 Single GPS를 이용하는 PVD-GPS 방법을 적용하였다. GPS는 위성에서 수신기까지 전파도달 시간을 측정하는 방법으로 시간과 거리는 물론 위치 정보도 산출한다. GPS에서 파고를 측정하는 원리는 파장이 짧아지거나 길어지는 Doppler 편차 원리를 응용하여 GPS 신호의 주파수 변화가 부이의 수직적인 속도 변화이므로 이를 이용하여 해수변의 변위 값을 계산한다. 즉, 부이가 위성쪽으로 수직 상승 운동을 하게되면 GPS 신호의 주파수는 증가하고 반대로 멀어지면 감소하게 될 것이다. 이러한 부이의 수직적 이동 속도를 시간에 대해 적분하여 변위값을 산출할 수 있는 것이다(Fig. 4). 이러한 원리를 이용하여 부이에서 GPS를 설치할 경우 파고의 변화를 측정할 수 있다.

The GPS wave measurement principle (Jean et al, 2012)
3. GPS 센서의 성능 평가
3.1 파고 관측 자료처리
본 연구는 풍파(wind wave)의 관측을 목적으로 하기 때문에 2 sampling rate로 설정하였다. 이 경우 1초에 2회 측정을 할 수 있으며, 2,048개의 자료를 취득할 경우 약 17분 시간이 소요된다. 측정된 자료는 FFT방법으로 처리하였으며, WMO[1998]에서 제시하는 방법을 적용하였다.
해양에서의 파랑은 주기, 파속, 파장 등이 서로 다른 성분파들이 선형적으로 중첩되어 비선형적인 불규칙한 파형으로 나타난다. 유의파고 계산은 통계적 방법(또는 대표파법)으로 계산된 값은 H1/3로 표기하며, 스펙트럼분석에 의해 산출된 값은 Hm0 또는 Hs로 표기한다. 일정 주파수대 또는 파수 사이에 에너지의 집중을 정량적으로 분석하여 불규칙파를 표현하는 것을 주파수 스펙트럼이라 한다. 스펙트럼 분석은 BT(Blackman-Turkey)방법, FFT(Fast Fourier Transform)방법, MEM(Maximun Entropy Method)방법 등 다양한 분석법이 있으나, 실시간 관측을 위한 FFT 방법은 자료 처리 시간이 다른 방법에 비해 빠르게 진행되고 적은 데이터로거의 용량에 적합하므로 현장에서 운용하는 방법으로 적합하다.
모든 성분파를 합한 에너지를 파랑의 에너지 스펙트럼밀도(energy spectrum density) 또는 주파수 스펙트럼(frequency spectrum)이라 한다. 따라서 에너지 스펙트럼 밀도 분석으로 해양에서의 파성분을 산출하게되는 것이다. 주파수 스펙트럼이 주어지면 n차 모멘트는 다음 식으로 정의된다.

이 모멘트를 이용하여 유의파고와 주기를 다음과 같이 나타낼 수 있다.

여기서, f는 주파수를 의미하고, m0는 주파수 스펙트럼의 0차 모멘트(moment of zero-th order), m2는 2차 모멘트(moment of 2nd order)이다. Hm0는 주파수스펙트럼 또는 에너지스펙트럼에서 계산되는 유의파고이며, 대표파법에서의 유의파고 H1/3(Hm0≒1.05H1/3)와 같은 의미로 표현할 수가 있다(WMO, 1998). Tm02는 스펙트럼 방법으로 계산된 파의 주기를 의미한다. 한편 최대파고(Hmax) 및 최대파 주기(Tmax)는 통계적 방법을 사용하였는데, 최대파고는 관측 자료중 가장 파고가 큰 값을 선택하였으며, 최대파 주기도 최대파고의 주기를 선택하였다.
3.2 비교 관측 결과
Figs. 5와 6은 GPS 센서와 가속도 센서에서 관측된 최대파고(Hmax)와 유의파고(Hm0)의 관측 결과이다. 최대파고는 GPS 센서(MOSE-1000)에서 관측된 결과가 가속도센서(Hippy-40)에서 관측된 결과보다 약간 낮게 관측된 경향을 보여주고 있으나(Fig. 5), 유의파고는 거의 일치하는 관측된 결과를 보여주고 있다(Fig. 6).

Time series of maximum wave height

Time series of significant wave height
최대파의 주기는 GPS 센서(MOSE-1000)에서 관측된 결과가 가속도센서(Hippy-40)에서 관측된 결과보다 다소 짧은 주기의 파가 관측된 결과를 보여주고 있으나(Fig. 7), 유의파의 주기는 차이점이 거의 없는 관측 결과를 보여주고 있다(Fig. 8).

Time series of Maximum wave periods

Time series of significant wave periods
Fig. 9는 GPS센서(MOSE-1000)와 가속도센서(Hippy-40)에서 관측된 자료의 상관도를 나타낸 결과이다. 최대파고의 상관도는 아주 양호한 상관성을 보여 주고 있으나(Fig. 9(a)), 최대파 주기의 상관도 결과는 다소 분산된 결과를 보여주고 있다(Fig. 9(b)). 유의파고와 유의파 주기는 거의 일치하는 상관도를 보여 주고 있다(Fig. 9(c)와 (d)). 이러한 비교 관측 결과는 GPS 정보를 이용한 파고 관측 자료의 품질이 아주 우수하다는 것을 의미하는 것이다. 최대파 주기가 다른 성분에 비해 다소 분산도가 크게 나타나고 있는데, 이는 최대파주기 측정 간격을 0.5 sec 간격으로 설정하였기 때문이다. 향후 관측 시에는 최대파 주기의 측정간격도 0.1 sec 간격을 설정할 경우 보다 좋은 결과를 얻을 수 있다.

The relationship between Hippy-40 and MOSE-1000
3.3 통계적 검증
GPS 센서에서 관측된 자료의 성능검증을 위하여 통계적으로 RMSE(Root mean square error), BIAS(mean error), CORR(Correlation Coefficient) 등이 사용되었다. RMSE는 통계적으로 표준편차의 의미, 즉 예상한 값과 실제 관측 결과가 평균적으로 얼마만큼 차이가 있는가를 의미하며, BIAS는 관측 자료가 평균값으로부터 벗어난 정도이며, CORR은 하나의 변수가 다른 변수와 어느 정도 밀접한 관련성을 갖는지 알아보기 위해 사용된다.

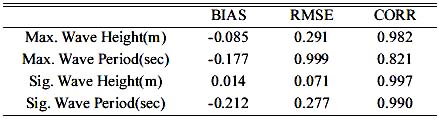
The result of various assessments for the wave data
Table 1은 GPS센서의 성능 평가 결과이다. 최대파고의 BIAS는 -0.085로 GPS 센서에 의한 관측이 8.5 cm 정도 높게 관측이 되고 있으며, RMSE 값이 0.291로 약 30 cm의 차이가 나고 있다. 그러나 유의파고의 비교에서 BIAS는 양의 값이지만 0.014로 거의 차이가 나지 않으며, RMSE에서도 0.071로 차이가 아주 적게 나타나고 있다. 최대파주기와 유의파주기의 분석에서는 BIAS는 각각 0.177초와 0.212초 밖에 차이가 나지 않으며, RMSE에서도 각각 약 0.997 및 0.277로 차이가 거의 나타나지 않고 있다. 또한 두 변수의 상관성을 의미하는 유의파고와 유의파주기의 상관계수는 각각 0.997 및 0.990로 거의 일치하는 결과를 보여주고 있으며, 최대 파고와 최대파주기의 상관계수도 각각 0.982와 0.821로 아주 양호한 상관성을 보여주고 있다. 이러한 통계적 결과는, GPS를 이용한 파고 및 파 주기의 관측 값은 비교적 우수하게 측정되고 있다는 것을 입증하는 것이다.
4. 고 찰
단일 GPS를 이용한 파고 관측 시스템으로부터 관측된 자료의 성능을 평가하기 위하여 전 세계적으로 성능이 입증된 "Hippy-40" 가속도 센서를 동일한 부이에 설치하여 장기간 비교 관측을 실시하였다. 그 결과, GPS를 이용한 파고 관측시스템에서 관측된 유의파고, 최대파고, 파의 주기 등의 결과는 "Hippy-40"센서에서 관측된 결과와 거의 일치하는 상관성을 보여주고 있다. 이러한 비교 관측 결과는 GPS에 의한 관측 자료의 품질이 아주 우수하다는 것을 보여준다. 그러므로 연안지역에서 소형부이를 이용하여 파고를 관측하고자 할 때 GPS를 설치하면 가속도센서에 비해 저가의 비용이 소요되는 것은 물론 우수한 관측자료를 취득할 수 있을 것이다. 또한 표류부이(Drifting Buoy)에도 GPS를 설치하여 관측할 경우, 해수의 이동에 따른 위치정보를 이용한 조류 또는 해류의 움직임에 대한 관측과 함께 파고를 관측할 수 있는 장점이 있을 것이다.
Acknowledgments
본 연구는 국립해양조사원에서 수행하는 KOGA 시스템 구축 및 국제공동해양순환연구(II)"의 지원과 기상청 기상산업지원 및 활용 기술 개발사업(RACS 2011-7002)의 지원으로 수행되었습니다.
References
-
L.H Holthuijsen, “Waves in Oceanic and Coastal Waters”, (2007), p387.
[https://doi.org/10.1017/CBO9780511618536]

-
G Jeans, I Bellamy, J.J Vries, P Weert, “Sea Trial of the New Datawell GPS Directional Waverider”, (www.datawell.nl), (2012).
[https://doi.org/10.1109/CCM.2003.1194302]
- H Kawai, M Satoh, K Kawaguchi, K Seki, “Annual Report on Nationwide Ocean Wave Information Network for Ports and Harbours (NOWPHAS 2009)”, Technical Note of the Port and Airport Research Institute", Port and Airport Research Institude, JAPAN, (2011), (1226), p120, (in Japaness).
- H Kawai, M Satoh, K Kawaguchi, K Seki, “Offshore Wave Characteristics Observed by GPS Buoys on the Tohoku to Shikoku District Coast of the Pacific Ocean, Japan”, Technical Note of the Port and Airport Research Institute", Port and Airport Research Institude, JAPAN, (2012), (1249), p51, (in Japaness).
-
T.H Kim, Y.S Gang, W.B Lee, D.H Kim, “Development of Long Period Wave Observation System based on GPS”, (2011), 35(5), p682-689.
[https://doi.org/10.5916/jkosme.2011.35.5.682]
- KMA, “Strategy to build a real-time monitoring system for coastal disasters”, (2009), p255.
- T Nagai, K Shimizu, M Sasaki, “Characteristics of th Observed offshore Data by the Northern Pacific GPS Buoys”, Report of the Port and Airport Research Institute, (2008), 47(2), p1-52, (in Japaness).
- F Takashi, Y Terada, T Nagai, T Kato, “A Development of GPS Wave, Tide, and Tsunami Meter”, Wave, Tide Observations and Modelings in the Asian-Pacific Region, ACECCTC1 Workshop, (2004), p61-72.
- WMO, “Guide to Wave Analysis and Forecasting”, (1998), p159.
-
Y.J Yoo, C.U Song, K Nobuyoshi, F Hidenobu, “A Study on Wave Observation System with GPS Arrayed Buoys by using MUSIC Method”, Inter. J. of Navigation and Port Research, (2003), 27(6), p677-682.
[https://doi.org/10.1016/j.ejmp.2011.08.001]